
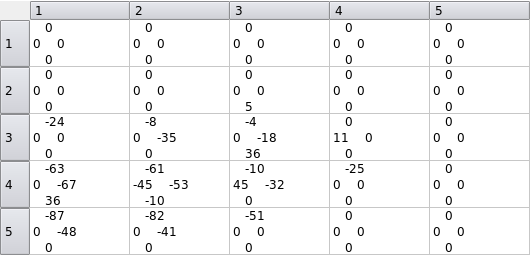
On the laboratory carpet:

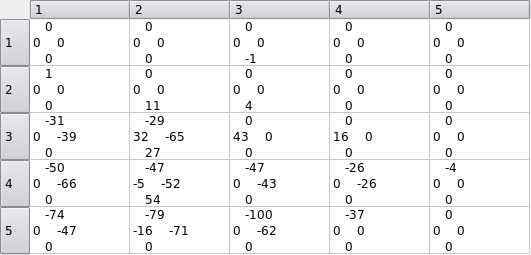
On a foam mat:
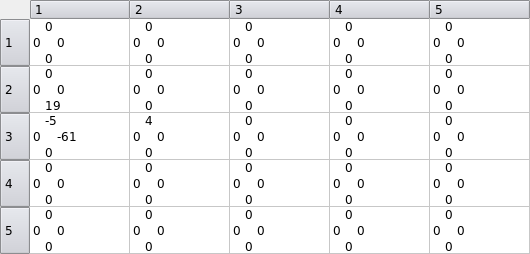
On a desk:

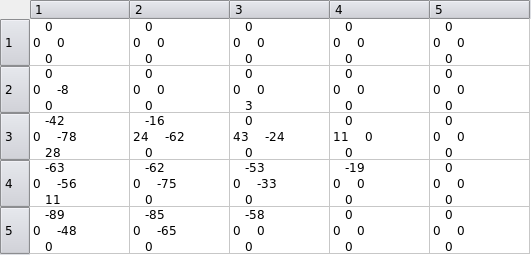
On a wet desk with slippery surface:

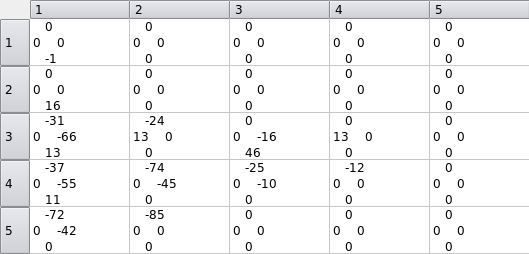
On a linoleum surface:

The Crawling Robot Simulator
Check out the Python 2D Crawling robot simulation on Github developed by a group of my students from the lecture „Applied Reinforcement Learning“ @ LMU: https://github.com/micheltokic/crawlingrobot
The package contains:
- OpenAI gym environment for discrete and continuous actions
- Example ipynb notebook with:
- Manual control
- Q-Learning example (discrete actions)
- PPO2 (continuous actions) example using stable-baselines

Relevant Literature
- M. Tokic and H. Bou Ammar.
Teaching reinforcement learning using a physical robot.
In Proceedings of the Workshop on Teaching Machine Learning at
the 29th International Conference on Machine Learning, Edinburgh, UK,
2012.
(to appear). - W. Ertel. Introduction to Artificial Intelligence. Springer London, 2011.
- S. Montresor, J. Kay, M. Tokic, and J. Summerton.
Work in progress: Programming in a confined space – a case study in
porting modern robot software to an antique platform.
In Proceedings of the 41st ASEE/IEEE Frontiers in Education
Conference, pages T3H-1-T3H-3, Rapid City, SD, USA, 2011. IEEE
Press. - M. Tokic, A. Usadel, J. Fessler, and W. Ertel.
On an educational approach to behavior learning for robots.
In Proceedings of the 1st International Conference on Robotics
in Education, pages 171-176, Bratislava, Slovak Republic, 2010. Slovak
University of Technology in Bratislava. - M. Tokic, J. Fessler, and W. Ertel.
The crawler, a class room demonstrator for reinforcement learning.
In C. Lane and H. Guesgen, editors, Proceedings of the 22th
International Florida Artificial Intelligence Research Society Conference
FLAIRS’09, pages 160-165, Menlo Park, California, USA, 2009. AAAI
Press. - W. Ertel, M. Schneider, R. Cubek, and M. Tokic.
The Teaching-Box: a universal robot learning framework.
In Proceedings of the 14th International Conference on Advanced
Robotics ICAR’09., pages 1-6, 2009. - H. Kimura, K. Miyazaki, and S. Kobayashi.
Reinforcement learning in POMDPs with function approximation.
In Proceedings of the 14th International Conference on Machine
Learning (ICML’97), pages 152-160, San Francisco, CA, USA, 1997.
Morgan Kaufmann Publishers Inc.